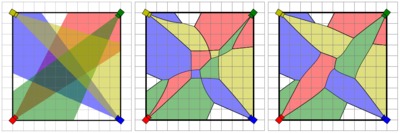

A challenge of pan/tilt/zoom (PTZ) camera networks for efficient and flexible visual monitoring is automated active network reconfiguration in response to environmental stimuli. In this paper, given an event/activity distribution over a convex environment, we propose a new provably correct reactive coverage control algorithm for PTZ camera networks that continuously (re)configures camera orientations and zoom levels (i.e., angles of view) in order to locally maximize their total coverage quality. Our construction is based on careful modeling of visual sensing quality that is consistent with the physical nature of cameras, and we introduce a new notion of conic Voronoi diagrams, based on our sensing quality measures, to solve the camera network allocation problem: that is, to determine where each camera should focus in its field of view given all the other cameras’ configurations. Accordingly, we design simple greedy gradient algorithms for both continuous- and discrete-time first-order PTZ camera dynamics that asymptotically converge a locally optimal coverage configuration. Finally, we provide numerical and experimental evidence demonstrating the effectiveness of the proposed coverage algorithms.