
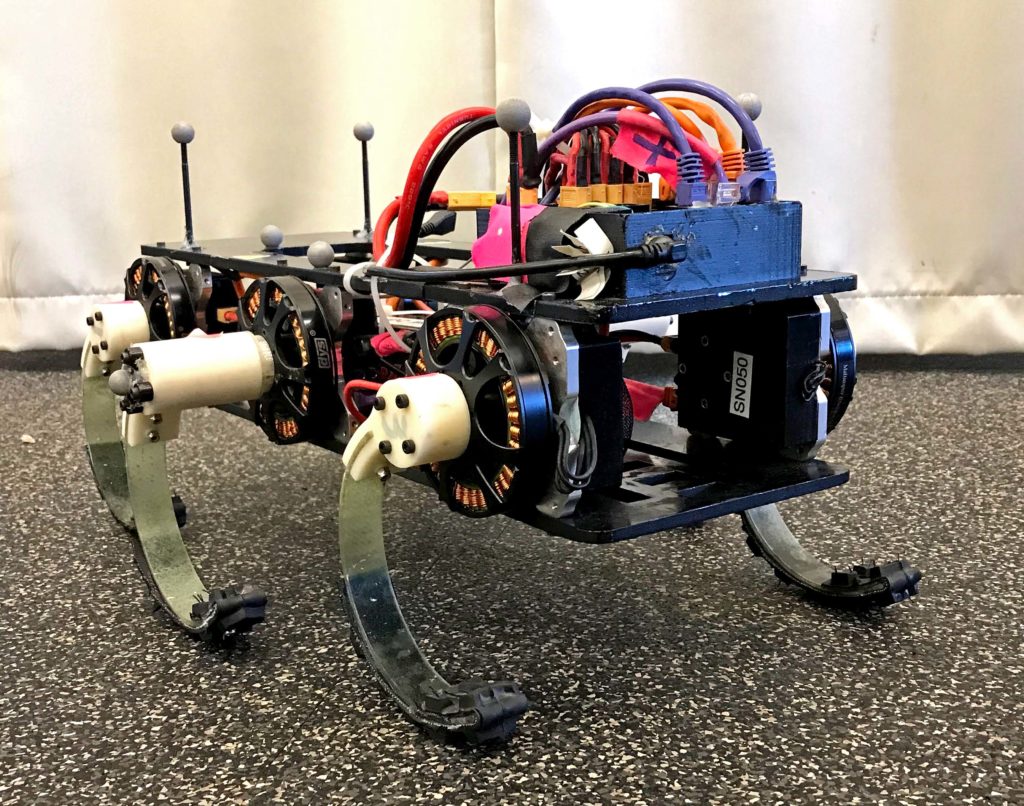
Q (formerly known as HQRHex) is a smaller version (0.48 m X 0.29 m) of the C-legged RHex class robots. Each leg is attached to a gearless direct-drive motor, which provides a fast and accurate torque estimation during the robot’s interaction with the obstacles. This robot can also be programmed to function as a quadruped (the two middle legs held up in the air and not engaged in locomotion) during obstacle field traversing.