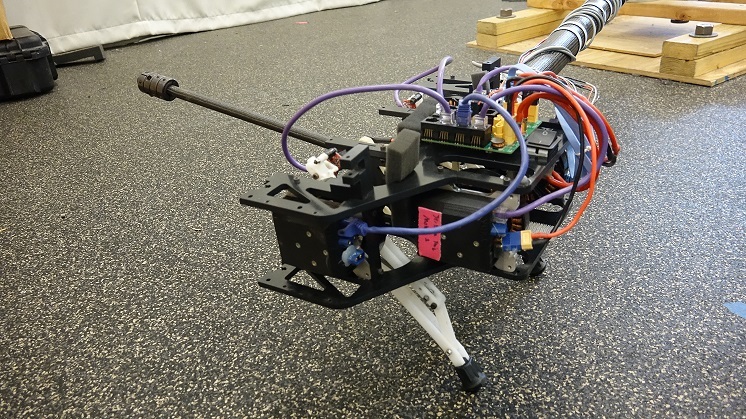
Jerboa is a 2.5Kg tailed bipedal robot with two passive-compliant underactuated legs, and a tail that can pitch as well as yaw. It can achieve varied modes of quasistatic and dynamic balance, enabling a broad range of locomotion tasks including sitting, standing, walking, hopping, running, turning, leaping, and more. It is used as a vehicle for research on controls, bio-inspiration, and mechanisms.

a subsidiary of the Penn Engineering GRASP Lab