
Why reactive planning?
Reactive planning refers to the control strategy where a robot maps directly from its state to its available actions. This contrasts with deliberative planning, where a robot carries out (often extensive) computation to select an action.
Both types of planning are required for robots to carry out complex behavior, but reactive planning is especially suited to low-level control where it is essential to respond quickly to changing environmental conditions. By developing reactive planners capable of carrying out complex behaviors, we enable the development of increasingly effective deliberative planners.
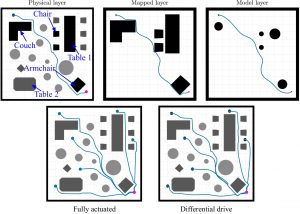
Reactive Planning in Non-Convex Environments
This research aims to integrate offline and online information for real-time execution of a provably correct navigation algorithm in non-convex environment, leveraging tools from the semantic SLAM and perception literature.
Sponsor: AFRL
Group: Vasileios Vasilopoulos
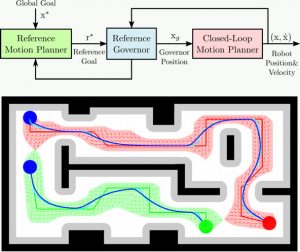
Reactive Planning in Convex Environments
This research aims to integrate feedback control and machine perception for the design of safe reactive robot behaviors that are responsive to changes in the robot’s surrounding environment.
Sponsor: AFRL
Group: Omur Arslan, Vasileios Vasilopoulos
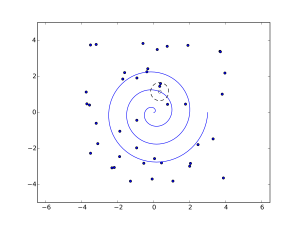
Reactive Motivational Dynamics
Sponsor: AFRL
Group: Paul Reverdy, Vasileios Vasilopoulos
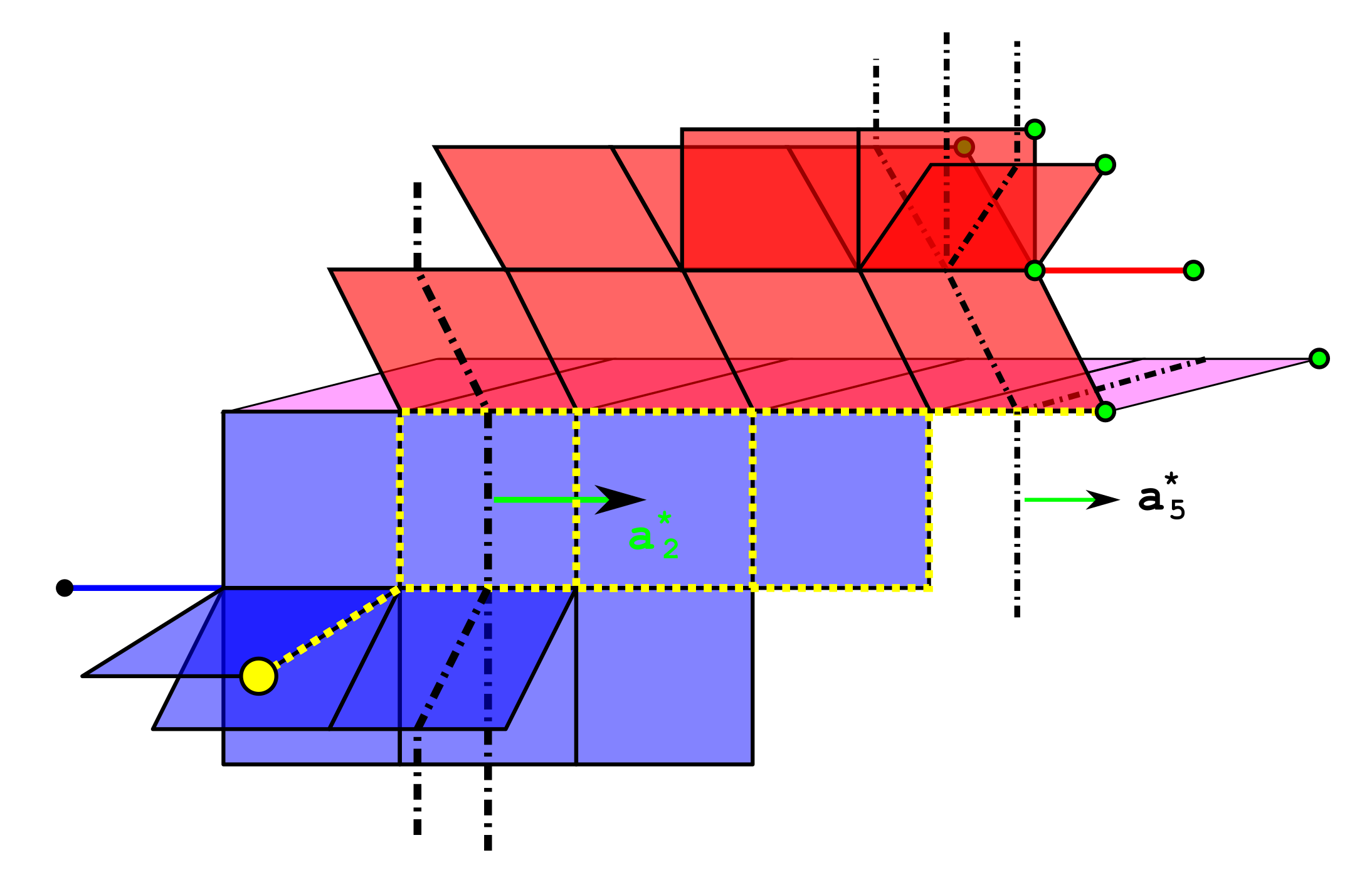
Universal Memory-and-Control Architectures
Sponsor: AFRL
Past Sponsors: AFOSR CHASE MURI, NSF-CABiR
Group: Dan Guralnik, Daniel E. Koditschek, Siqi Huang (Penn CIS-CGGT masters program graduate) and Darius Rodgers (Penn ESE Junior, 2017)