
This research aims to integrate feedback control and machine perception for the design of safe reactive robot behaviors that are responsive to changes in the robot’s surrounding environment.
Why this research is exciting: Here, feedback motion planning offers robustness to unforeseen uncertainty in the system model and environment. We develop novel rigorous mathematical frameworks that enable the design of provably correct sensor-based reactive planning algorithms in convex environments. Reactive planning that integrates sensing and control in the motion design is the only option for a safer involvement of robots in our daily lives.
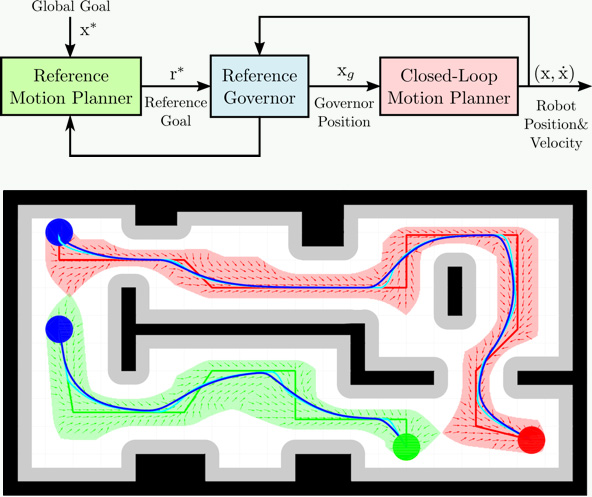
Challenges: The standard motion planning approach in robotics follows the traditional “sense-plan-act” cycle, meaning that a robot first senses its surrounding, and then generates a motion plan, and then follows this plan in an open-loop fashion (i.e., blindly) for a certain time, and continues with this “sense-plan-act“ cycle. However, because of its open-loop nature, this approach is very brittle under modelling errors and sensory noise. This research aims to overcome this limitation by introducing new design principles for reactive motion planning that integrate sensing and control. Some of these principles have already been successfully implemented in the challenging, noisy setting of legged robots, using only on-board sensors.
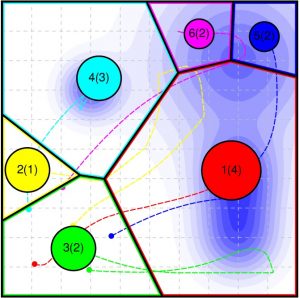
Reactive coverage control of mobile sensor networks.
Participants
Omur Arslan’s role: Omur has actively contributed to the development of rigorous mathematical frameworks for reactive motion planning, their experimental validation and scientific documentation.
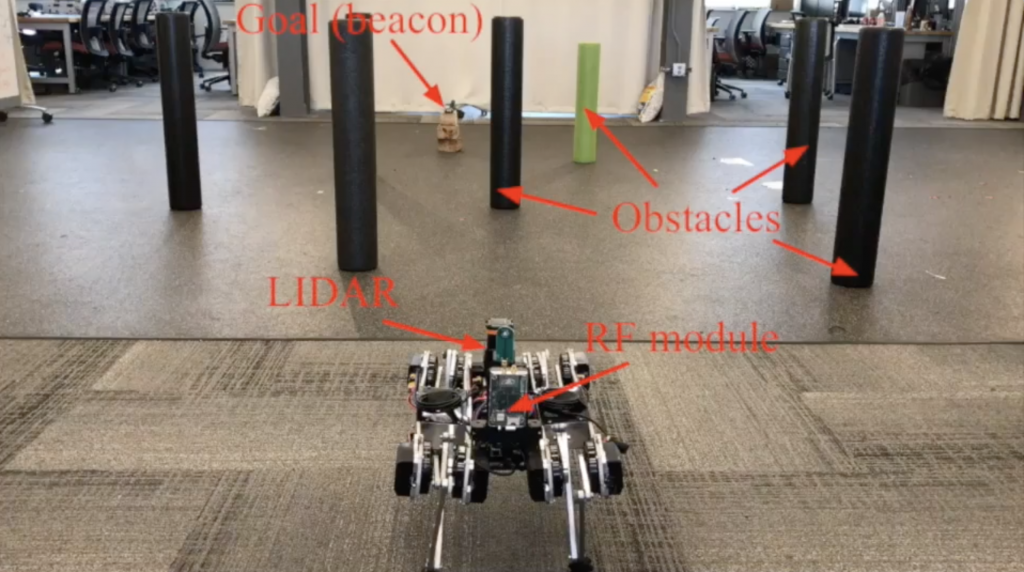
Vasileios Vasilopoulos‘s role: Vassilis has been involved with the range-only target localization scheme which is coupled with the reactive planner, as well as the sensor integration and unicycle gait characterization needed for the experimental work on Minitaur.
Publications: ICRA 2016, WAFR 2016, ICRA 2017, ROBIO 2017
Sponsor: AFRL