
A Hybrid Systems Model for Simple Manipulation and Self-Manipulation Systems
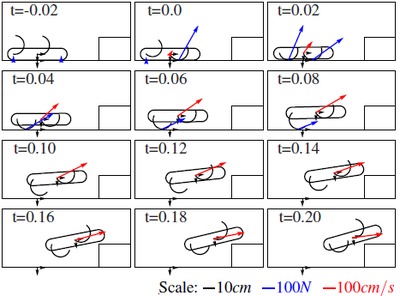

Rigid bodies, plastic impact, persistent contact, Coulomb friction, and massless limbs are ubiquitous simplifications introduced to reduce the complexity of mechanics models despite the obvious physical inaccuracies that each incurs individually. In concert, it is well known that the interaction of such idealized approximations can lead to conflicting and even paradoxical results. As robotics modeling moves from the consideration of isolated behaviors to the analysis of tasks requiring their composition, a mathematically tractable framework for building models that combine these simple approximations yet achieve reliable results is overdue. In this paper we present a formal hybrid dynamical system model that introduces suitably restricted compositions of these familiar abstractions with the guarantee of consistency analogous to global existence and uniqueness in classical dynamical systems. The hybrid system developed here provides a discontinuous but self-consistent approximation to the continuous (though possibly very stiff and fast) dynamics of a physical robot undergoing intermittent impacts. The modeling choices sacrifice some quantitative numerical efficiencies while maintaining qualitatively correct and analytically tractable results with consistency guarantees promoting their use in formal reasoning about mechanism, feedback control, and behavior design in robots that make and break contact with their environment.
For more information: Kod*Lab
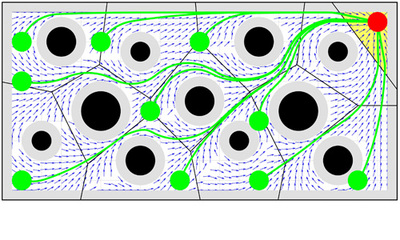
Sensor-Based Reactive Navigation in Unknown Convex Sphere Worlds

We construct a sensor-based feedback law that provably solves the real-time collision-free robot navigation problem in a compact convex Euclidean subset cluttered with unknown but sufficiently separated and strongly convex obstacles. Our algorithm introduces a novel use of separating hyperplanes for identifying the robot’s local obstacle-free convex neighborhood, affording a reactive (online-computed) piecewise smooth and continuous closed-loop vector field whose smooth flow brings almost all configurations in the robot’s free space to a designated goal location, with the guarantee of no collisions along the way. We further extend these provable properties to practically motivated limited range sensing models.
Voronoi-Based Coverage Control of Heterogeneous Disk-Shaped Robots
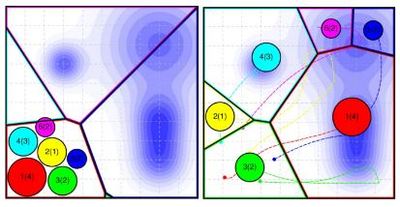

In distributed mobile sensing applications, networks of agents that are heterogeneous respecting both actuation as well as body and sensory footprint are often modelled by recourse to power diagrams — generalized Voronoi diagrams with additive weights. In this paper we adapt the body power diagram to introduce its “free subdiagram,” generating a vector field planner that solves the combined sensory coverage and collision avoidance problem via continuous evaluation of an associated constrained optimization problem. We propose practical extensions (a heuristic congestion manager that speeds convergence and a lift of the point particle controller to the more practical differential drive kinematics) that maintain the convergence and collision guarantees.
For more information: Kod*lab
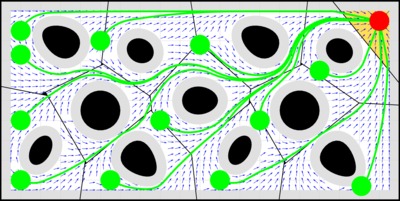
Clustering-Based Robot Navigation and Control
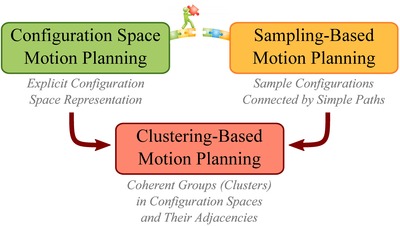

In robotics, it is essential to model and understand the topologies of configuration spaces in order to design provably correct motion planners. The common practice in motion planning for modelling configuration spaces requires either a global, explicit representation of a configuration space in terms of standard geometric and topological models, or an asymptotically dense collection of sample configurations connected by simple paths. In this short note, we present an overview of our recent results that utilize clustering for closing the gap between these two complementary approaches. Traditionally an unsupervised learning method, clustering offers automated tools to discover hidden intrinsic structures in generally complex-shaped and high-dimensional configuration spaces of robotic systems. We demonstrate some potential applications of such clustering tools to the problem of feedback motion planning and control. In particular, we briefly present our use of hierarchical clustering for provably correct, computationally efficient coordinated multirobot motion design, and we briefly describe how robot-centric Voronoi diagrams can be used for provably correct safe robot navigation in forest-like cluttered environments, and for provably correct collision-free coverage and congestion control of heterogeneous disk-shaped robots.
For more information: Kod*lab
Exact Robot Navigation Using Power Diagrams

We reconsider the problem of reactive navigation in sphere worlds, i.e., the construction of a vector field over a compact, convex Euclidean subset punctured by Euclidean disks, whose flow brings a Euclidean disk robot from all but a zero measure set of initial conditions to a designated point destination, with the guarantee of no collisions along the way. We use power diagrams, generalized Voronoi diagrams with additive weights, to identify the robot’s collision free convex neighborhood, and to generate the value of our proposed candidate solution vector field at any free configuration via evaluation of an associated convex optimization problem. We prove that this scheme generates a continuous flow with the specified properties. We also propose its practical extension to the nonholonomically constrained kinematics of the standard differential drive vehicle.
For more information: Kod*lab
Towards Bipedal Behavior on a Quadrupedal Platform Using Optimal Control


This paper explores the applicability of a Linear Quadratic Regulator (LQR) controller design to the problem of bipedal stance on the Minitaur [1] quadrupedal robot. Restricted to the sagittal plane, this behavior exposes a three degree of freedom (DOF) double inverted pendulum with extensible length that can be projected onto the familiar underactuated revolute-revolute “Acrobot” model by assuming a locked prismatic DOF, and a pinned toe. While previous work has documented the successful use of local LQR control to stabilize a physical Acrobot, simulations reveal that a design very similar to those discussed in the past literature cannot achieve an empirically viable controller for our physical plant. Experiments with a series of increasingly close physical facsimiles leading to the actual Minitaur platform itself corroborate and underscore the physical Minitaur platform corroborate and underscore the implications of the simulation study. We conclude that local LQR-based linearized controller designs are too fragile to stabilize the physical Minitaur platform around its vertically erect equilibrium and end with a brief assessment of a variety of more sophisticated nonlinear control approaches whose pursuit is now in progress.
On the Optimality of Napoleon Triangles
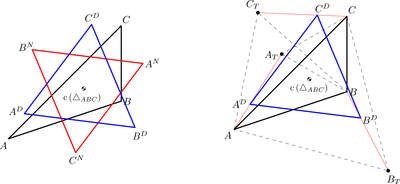

An elementary geometric construction, known as Napoleon’s theorem, produces an equilateral triangle, obtained from equilateral triangles erected on the sides of any initial triangle: The centers of the three equilateral triangles erected on the sides of the arbitrarily given original triangle, all outward or all inward, are the vertices of the new equilateral triangle. In this note, we observe that two Napoleon iterations yield triangles with useful optimality properties. Two inner transformations result in a (degenerate) triangle, whose vertices coincide at the original centroid. Two outer transformations yield an equilateral triangle, whose vertices are closest to the original in the sense of minimizing the sum of the three squared distances.
For more information: Kod*lab
Design Principles for a Family of Direct-Drive Legged Robots
This letter introduces Minitaur, a dynamically running and leaping quadruped, which represents a novel class of direct-drive (DD) legged robots. We present a methodology that achieves the well-known benefits of DD robot design (transparency, mechanical robustness/efficiency, high-actuation bandwidth, and increased specific power), affording highly energetic behaviors across our family of machines despite severe limitations in specific force. We quantify DD drivetrain benefits using a variety of metrics, compare our machines’ performance to previously reported legged platforms, and speculate on the potential broad-reaching value of “transparency” for legged locomotion.
For more information: Kod*lab.
Universal Memory Architectures for Autonomous Machines
We propose a self-organizing memory architecture (UMA) for perceptual experience provably capable of supporting autonomous learning and goal-directed problem solving in the absence of any prior information about the agent’s environment. The architecture is simple enough to ensure (1) a quadratic bound (in the number of available sensors) on space requirements, and (2) a quadratic bound on the time-complexity of the update-execute cycle. At the same time, it is sufficiently complex to provide the agent with an internal representation which is (3) minimal among all representations which account for every sensory equivalence class consistent with the agent’s belief state; (4) capable, in principle, of recovering a topological model of the problem space; and (5) learnable with arbitrary precision through a random application of the available actions. These provable properties — both the trainability and the operational efficacy of an effectively trained memory structure — exploit a duality between weak poc sets — a symbolic (discrete) representation of subset nesting relations — and non-positively curved cubical complexes, whose rich convexity theory underlies the planning cycle of the proposed architecture.