
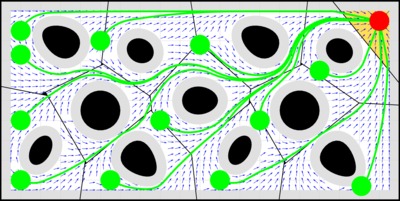

We construct a sensor-based feedback law that provably solves the real-time collision-free robot navigation problem in a compact convex Euclidean subset cluttered with unknown but sufficiently separated and strongly convex obstacles. Our algorithm introduces a novel use of separating hyperplanes for identifying the robot’s local obstacle-free convex neighborhood, affording a reactive (online-computed) piecewise smooth and continuous closed-loop vector field whose smooth flow brings almost all configurations in the robot’s free space to a designated goal location, with the guarantee of no collisions along the way. We further extend these provable properties to practically motivated limited range sensing models.