
Locomotion on flowing granular ground is unlike locomotion on hard ground because feet and/or wheels experience both solid- and fluid-like forces during surface penetration.

This is the essence of why navigating over granular material is a challenging undertaking for most all manmade vehicles. Places such as sandy beaches or snow covered mountain tops typically present very hard, if not unmanageable, obstacles to vehicles of all types. Yet, these same challenging environments are places teeming with animals that have developed effective navigation techniques. Studying such biological models and conducting systematic experiments with robotic models on controlled granular media our group aims to 1) build a concrete understanding of the dynamics of granular material; and 2) design a legged robotic system that can demonstrate high locomotion performance on granular media.
This project is a collaboration between the CRAB Lab, Georgia Institute of Technology (the lead) and Kod*Lab, University of Pennsylvania. The CRAB Lab is the granular material experts and their team conducts systematic experiments on granular material. KodLab contributes the robotics expertise and SandBot experimental platform. This research page is maintained by the UPenn group. For more information you can contact Dr. Haldun Komsuoglu or Prof. Daniel Goldman.
Robot Platform
Overview
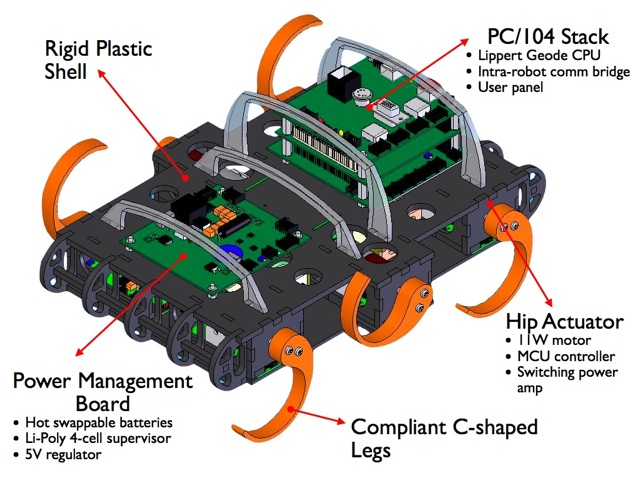
RHex/SandBot v1.0 is a computationally and energetically autonomous legged robotic mobility system. It adopts the RHexmorphology which consists of a rigid body supported by six compliant half-circle legs. Each leg has a single actuated degree of freedom driving the hip angle. The electronic design of the robot is based on the modular EduBot infrastructure. The body measures 32.5(L)x22(W)x44(H) cm and the legs are 5.5cm long (radially).
On-Board Computer
RHex/SandBot platform features Lippert Cool RoadRunner II, an on-board single board computer (SBC) from Lippert Embedded Computers GmbH. In order to facilitate easier hardware upgrades our design employs the popular PC/104 form factor SBC solutions. Cool RHex/RoadRunner II is a Pentium class CPU board running at 200 RHex/MHz with USB 1.1, 10/100 RHex/BaseT ethernet, serial and parallel ports. This low power CPU consumes maximum 6 watts requiring neither active nor passive cooling.
Power Source
RHex/SandBot is powered by a TP1320-4, a 4-cell Li-Poly battery packs with 20C continuous discharge capacity from ThunderPower. The Li-Poly battery is supervised by a custom battery monitoring circuitry that ensure that the battery is not damaged by being over-discharged.
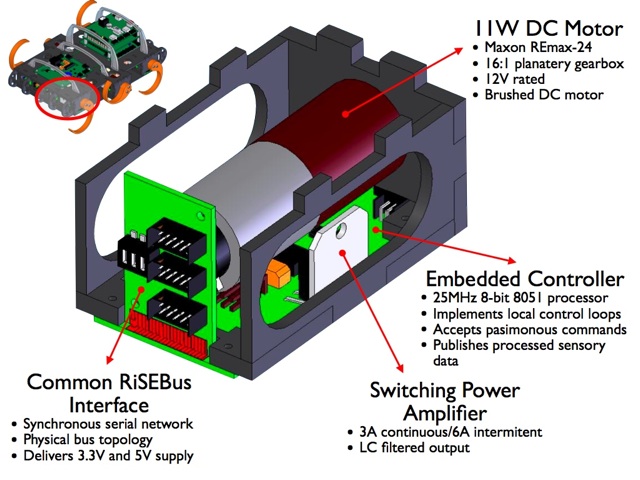
Actuation
Hip actuators employ a DC motor drive train from Maxon Motor consisting: 1) REmax-24, a high precision 11W DC brushed motor; 2) GP22-C, a 16:1 metal planetary gear box; and 3) MR encoder, a digital magnetic encoder with 512 cpt. Each hip features a custom designed embedded controller driving a switching power amplifier. The microcontroller on the control board performs local control tasks and links up to the on-board SBC over the standard RiSEBus network.
Leg
Passive mechanical properties of legs play an important role in behavioral capabilities and performance of a dynamical locomotion system. Our research team observed this fact quite prominently in our previous work with RHex. Our team hypothesize that leg design is equally important on granular media, therefore the leg design is an ongoing part of our research activities. Our initial experiments with the RHex/SandBot v1.0 employed half-circle legs that are manufactured using shape-deposit-manufacturing (SDM) process — a mechanical prototyping approach that permits production of monolithic parts with varying mechanical properties. The legs are constructed using RHex/TP4000 with 5.5 cm diameter and 4 mm thick.

Group
Collaborators
- CRAB Lab – Complex Rheology and Biomechanics, Prof. Daniel Goldman.
Relevant Publications
- March of the SandBots, “IEEE Spectrum Magazine”, April 2009
- Sensitive Dependence of the Motion of a Legged Robot on Granular Media, Proceedings of National Academy of Science, February 2009
- Integrating a Hierarchy of Simulation Tools for Legged Robot Locomotion, Proceedings of Workshop on Robot Simulators, IEEE/RSJ International Conference on Intelligent Robots and Systems, 2008
Recent Events
- SandBot appeared in Daily Pennsylvania, April 29, 2009
- SandBot appeared in IEEE Spectrum, April 1, 2009
- SandBot project is featured on NPR’s Talk of the Nation, March 6, 2009.
- SandBot project is featured on NPR’s ScienceFriday, March 6, 2009.
- Breaking Science (BBC, audio), Epsiode 19
- A robot walks, sinks, and swims in granular media, Physics Today, Feb 19, 2009.