
This research is on the design and control of synthetic systems that can be flexibly and robustly programmed to carry out different tasks.
The usage of “programming” naturally draws comparisons to computer science, the parallels to which are on one hand fraught—the physics of energy-exchange precludes success factors such as “re-use of library elements” we are familiar with in computer engineering, and the physical world that our machines interact with is unpredictable and imprecise in a way that electrical signals on PCB’s are not, necessitating structural stability against perturbations in states and parameters. On the other hand, the analogy is enticing: steps toward mirroring the ability in computer science of re-using primitives (“modules” or “functions”) between robots, or having re-combinations in the same robot, would lead to rapid improvements in the capabilities of our machines.
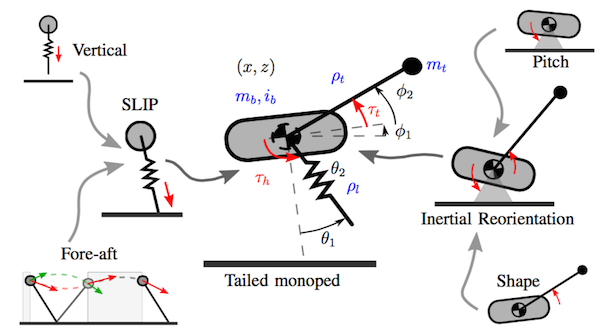
The application of these ideas has been programming dynamical steady-state locomotion on the horizontal plane, but using a method that generalizes across different morphologies (such as a hopping monoped, tailed biped, and a quadruped), at varying speeds of up to 5 body lengths/second, while maintaining formally-verifiable stability properties.
Challenges: More than three decades after “sense/think/act” was accepted as a roadmap for robotics research and practice, we (the robotics community) have made large demonstrable advances in isolated “thinking,” with clearly defined inputs (e.g., Go board state) and outputs (e.g., allowed Go moves). However, at the dawn of commercially-viable robotics, we need further assurances that our machines will be prepared for interactions (both of sensors and actuators) with an unstructured and unmodeled world, irrespective of whether we believe in deliberative or reactive versions of the sense/think/act paradigm.
When I entered the legged locomotion research arena, the success of Raibert’s MIT Leg Lab in the 1980’s was a huge influence—demonstrating simple machines that blindly hopped, ran, and performed acrobatic maneuvers. Over three decades later, our state-of-the-art machines underwhelmed us in the face of physical interaction. The DRC challenges were more complex than those solved by Raibert’s robots, but it should give us pause that years of preparation were insufficient to generate successful control strategies for a predefined set of tasks. One of the fundamental reasons our robots are “stuck” is the lack of principled methodologies for re-using and re-combining motor control algorithms such as the ones Raibert’s machines used—why must we re-invent how to walk and run again and again?
Why this research is exciting: This research agenda may perturb preconceptions about task-optimal practices, since we knowingly sacrifice optimality in our approach to synthesis. However, formally-verified synthesis of dynamic behaviors such as hopping and running in the presence of perturbations, using controllers that preserve robustness due to their simple explicit forms, should be encouraging to future and current practitioners.
Participants
Avik De’s role: My Ph.D. research has emphasized a strong integration of three efforts: mathematical foundations of compositions in legged robotics, design of complex robotic systems, and fielding abstract principles on systems in the real world.
Sponsor: Vannevar Bush Faculty Fellowship (VBFF)