
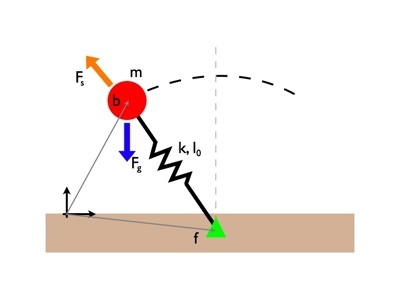

This paper investigates the relationship between energetic effi- ciency and the dynamical structure of a legged robot’s gait. We present an experimental data set collected from an untethered dynamic hexapod, EduBot [1] (a RHex-class [2] machine), operating in four distinct manually selected gaits. We study the robot’s single tripod stance dynamics of the robot which are identified by a purely jointspace-driven estimation method introduced in this paper. Our results establish a strong relationship between energetic efficiency (simultaneous reduction in power consumption and in- crease in speed) and the dynamical structure of an alternating tripod gait as measured by its fidelity to the SLIP mechanics—a dynamical pattern exhibit- ing characteristic exchanges of kinetic and spring-like potential energy [3]. We conclude that gaits that are dynamic in this manner give rise to better uti- lization of energy for the purposes of locomotion.
This work is supported in part by the National Science Foundation (NSF) under a FIBR Award 0425878. Yasemin Ozkan Aydin is supported by International Research Fellowship Programme of the Scientific and Technological Research Council of Turkey (TUBITAK).
For more information: Kod*Lab