
Recent results of dynamical systems theory are used to derive strong predictions concerning the global properties of a simplified model of a planar juggling robot. In particular, it is found that certain lower-order local (linearized) stability properties determine the essential global (nonlinear) stability properties, and that successive increments in the controller gain settings give rise to a cascade of stable period-doubling bifurcations that comprise a universal route to chaos. The theoretical predictions are verified by simulation and corroborated by experimental data from the juggling robot.
Exact robot navigation in geometrically complicated but topologically simple spaces
A navigation function is an artificial potential energy function on a robot configuration space (C-space) which encodes the task of moving to an arbitrary destination without hitting any obstacle. In particular, such a function possesses no spurious local minima. In this paper we construct navigation functions on forests of stars: geometrically complicated C-spaces that are topologically indistinguishable from a simple disc punctured by disjoint smaller discs, representing “model” obstacles. For reasons of mathematical tractability we approximate each C-space obstacle by a Boolean combination of linear and quadratic polynomial inequalities (with “sharp corners” allowed), and use a “calculus” of implicit representations to effectively represent such obstacles. We provide evidence of the effectiveness of this “technology” of implicit representations in the form of several simulation studies illustrated at the end of the paper.
A Family of Robot Control Strategies for Intermittent Dynamical Environments
This article develops a formalism for describing and analyzing a very simple representative class of robotic tasks that require “dynamical dexterity” – among them, the task of juggling. The authors review their empirical success, to date, with a new class of control algorithms for this task domain, called “mirror algorithms.” The formalism for representing the task domain and encoding within it the desired robot behavior enables them to prove that a suitable mirror algorithm is correct with respect to a specified task.
Planning and Control of Robotic Juggling Tasks
A new class of control algorithms – “mirror algorithms” – give rise to experimentally observedjuggling behavior in a simple robotic mechanism. The simplest of these algorithms (upon which all the others are founded) is provably correct with respect to a simplified model of the robot and its environment. This paper reviews the physical setup and underlying mathematical theory, discusses two significant extensions of the fundamental algorithm, provides data from our successful empirical verifications of these control strategies and briefly speculates upon the larger implications for the field of robotics.
For more information: Kod*Lab
A Simple Juggling Robot: Theory and Experimentation
We have developed a formalism for describing and analyzing a very simple representative of a class of robotic tasks which involve repeated robot-environment interactions, among then the task of juggling. We review our empirical success to date with a new class of control algorithms for this task domain that we call “mirror algorithms.” These new nonlinear feedback algorithms were motivated strongly by experimental insights after the failure of local controllers based upon a linearized analysis. We offer here a proof that a suitable mirror algorithm is correct with respect to the local version of the specified task — the “vertical one-juggle” — but observe that the resulting ability to place poles of the local linearized system does not achieve noticeably superior transient performance in experiments. We discuss the further analysis and experimentation that should provide a theoretical basis for improving performance.
For more information: Kod*Lab
Autonomous Mobile Robots Controlled by Navigation Functions
This paper reviews the theory of navigation functions and the attendant use of natural control techniques with emphasis upon applications to mobile autonomous robots. Results to date will be discussed in the context of a larger program of research that seeks effective parameterizations of uncertainty in robot navigation problems. Constructive solutions to particular cases of mobile robot navigation problems with complete certainty are provided as well.
A Distributed Message Passing Computational and I/O Engine for Real-Time
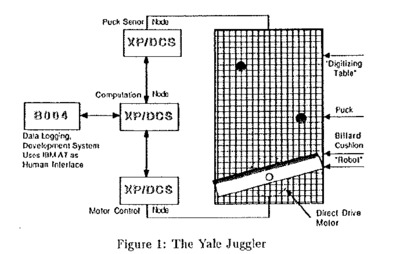

This paper illustrates the use of the Yale XP/DCS – a dual board real-time distributed control module based upon the INMOS Transputer family of micoprocessors – for high performance real-time motion control applications. The XP/DCS complements the the Transputer’s 1.5 Mflop computational rate and four independent on-chip 20 Mbps DMA communication engines, by providing a bidirectional latched 32 bit bus extension with full handshaking support for easy customization of the I/O capabilities of any node. After contrasting this design with commercially available alternatives we describe three particular applications presently underway in the Yale Robotics Laboratory. We conclude by reporting some initial experiments concerning the effect of code distribution and message passing protocols upon sampling rate.
For more information: Kod*Lab
The Cyclops Vision System
Cyclops is a distributed real-time vision system. It is “real-time” as for most vision tasks, it can be configured with enough processing nodes as to allow an update rate of 60 Hz with a maximum latency of 1/30s. This allows the system to be used directly as a feedback sensor for motion control. Even though Cyclops was built originally for tracking objects in 3D at 60Hz, it offers great flexibility. It can be configured to attack many vision tasks at much higher rates than was previously possible with systems that are up to an order of magnitude more expensive.
For more information: Kod*lab
Natural Control in Manufacturing
This paper reviews certain theoretical results in robot task planning and control obtained with the support of NSF Research Initiation Grant DMC-8505160. The “natural control” paradigm is reviewed and detailed attention is focused upon the specific task of robot navigation in a cluttered environment. The paper concludes with some comments concerning the problems which remain before this approach to robot command and control can be made practicable in a real manufacturing environment. A summary of formal results presented in the paper now follows. The class of “navigation functions” simultaneously encodes the task of navigating amidst obstacles and automatically generates correct feedback control laws for this purpose as well. We show that the topology of navigation tasks precludes any stronger class of controllers (with respect to convergence properties). On the other hand we demonstrate that a member of this class must exist for any environment. Finally, we construct controllers for an increasingly realistic catalogue of environments by recourse to “deformation” of the true environment into a computationally simpler but topologically equivalent model.
The Application of Total Energy as a Lyapunov Function for
Examination of total energy shows that the global limit behavior of a dissipative mechanical system is essentially equivalent to that of its constituent gradient vector field. The class of “navigation functions” is introduced and shown to result in “almost global” asymptotic stability for closed loop mechanical control systems upon which a navigation function has been imposed as an artifical potential energy. Two examples from the engineering literature – satellite attitude tracking and robot obstacle avoidance – are provided to demonstrate the utility of these observations.
For more information: Kod*Lab