
This paper develops a three degree-of-freedom sagittal-plane hybrid dynamical systems model of a bounding quadruped. Simple within-stance controls yield a closed form expression for a family of hybrid limit cycles that represent bounding behavior over a range of user-selected fore-aft speeds as a function of the model’s kinematic and dynamical parameters. Controls acting on the hybrid transitions are structured so as to achieve a cascade composition of in-place bounding driving the fore-aft degree of freedom thereby decoupling the linearized dynamics of an approximation to the stride map. Careful selection of the feedback channels used to implement these controls affords infinitesimal deadbeat stability which is relatively robust against parameter mismatch. Experiments with a physical quadruped reasonably closely match the bounding behavior predicted by the hybrid limit cycle and its stable linearized approximation.
Coronal Plane Spine Twisting Composes Shape To Adjust the Energy


Despite substantial evidence for the crucial role played by an active backbone or spine in animal locomotion, its adoption in legged robots remains limited because the added mechanical complexity and resulting dynamical challenges pose daunting obstacles to characterizing even a partial range of potential performance benefits. This paper takes a next step toward such a characterization by exploring the quasistatic terrestrial self-righting mechanics of a model system with coronal plane spine twisting (CPST). Reduction from a full 3D kinematic model of CPST to a two parameter, two degree of freedom coronal plane representation of body shape affordance predicts a substantial benefit to ground righting by lowering the barrier between stable potential energy basins. The reduced model predicts the most advantageous twist angle for several cross-sectional geometries, reducing the required righting torque by up to an order of magnitude depending on constituent shapes. Experiments with a three actuated degree of freedom physical mechanism corroborate the kinematic model predictions using two different quasistatic reorientation maneuvers for both elliptical and rectangular shaped bodies with a range of eccentricities or aspect ratios. More speculative experiments make intuitive use of the kinematic model in a highly dynamic maneuver to suggest still greater benefits of CPST achievable by coordinating kinetic as well as potential energy, for example as in a future multi-appendage system interacting with a contact-rich 3D environment.
Composition of Templates for Transitional Pedipulation Behaviors

Abstract. We document the reliably repeatable dynamical mounting and dismounting of wheeled stools and carts, and of fixed ledges, by the Minitaur robot. Because these tasks span a range of length scales that preclude quasi-static execution, we use a hybrid dynamical systems framework to variously compose and thereby systematically reuse a small lexicon of templates (low degree of freedom behavioral primitives). The resulting behaviors comprise the key competences beyond mere locomotion required for robust implementation on a legged mobile manipulator of a simple version of the warehouseman’s problem.
Rapid In Situ Characterization of Soil Erodibility With a Field
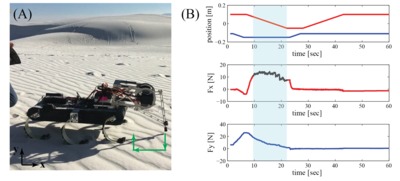

Predicting the susceptibility of soil to wind erosion is difficult because it is a multivariate function of grain size, soil moisture, compaction, and biological growth. Erosive agents like plowing and grazing also differ in mechanism from entrainment by fluid shear; it is unclear if and how erosion thresholds for each process are related. Here we demonstrate the potential to rapidly assemble empirical maps of erodibility while also examining what controls it, using a novel “plowing” test of surface-soil shear resistance (𝜏r) performed by a semi-autonomous robot. Field work at White Sands National Monument, New Mexico, United States, examined gradients in erodibility at two scales: (i) soil moisture changes from dry dune crest to wet interdune (tens of meters) and (ii) downwind-increasing dune stabilization associated with growth of plants and salt and biological crusts (kilometers). We found that soil moisture changes of a few percent corresponded to a doubling of 𝜏r, a result confirmed by laboratory experiments, and that soil crusts conferred stability that was comparable to moisture effects. We then compared different mechanisms of mechanical perturbation in a controlled laboratory setting. A new “kick-out” test determines peak shear resistance of the surface soil as a proxy for yield strength. Kick-out resistance exhibited a relation with soil moisture that was distinct from the plowing test and that was correlated with the independently measured threshold-fluid stress for wind erosion. Results show that our new method maps soil erodibility in arid environments and provides an understanding of environmental controls on variations in soil erodibility. (For more information: Kod*lab)
Mitigating energy loss in a robot hopping on a physically
We work with geoscientists studying erosion and desertification to improve the spatial and temporal resolution of their data collection over long transects in difficult realworld environments such as deserts. The Minitaur robot, which can run quickly over uneven terrain and use a single leg to measure relevant ground properties such as stiffness, is an attractive scout robot candidate for inclusion in a heterogeneous team in collaboration with a heavily geared, sensor-laden RHex. However, Minitaur is challenged by long-distance locomotion on sand dunes. Previous simulation results suggested that the energetic cost of transport can be mitigated by programming a virtual damping force to slow the intrusion of a Minitaur foot into simulated granular media following a bulk-behavior force law. In this paper, we present a ground emulator that can be used to test such locomotion hypotheses with a physical single-legged hopper jumping on emulated ground programmed to exhibit any compliance and damping characteristics of interest. The new emulator allows us to corroborate the conclusions of our previous simulation with physical hopping experiments. Programming the substrate emulator to exhibit the mechanics of a simplified bulk-behavior model of granular media characterized by linear stiffness and quadratic damping, we achieve a consistent energy savings of 20% in comparison with a nominal controller, with savings of up to 50% under specific conditions.
For more information, see https://kodlab.seas.upenn.edu.
Mechanical and virtual compliance for robot locomotion in a compliant

This abstract was accepted to the Robot Design and Customization workshop at ICRA 2019.
For more information: Kod*lab.
Systematizing Gibsonian affordances in robotics: an empirical, generative approach derived
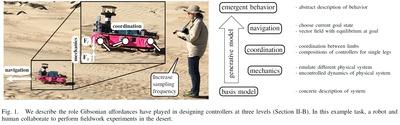

A Gibsonian theory of affordances commits to direct perception and the mutuality of the agent-environment system. We argue that there already exists a research program in robotics which incorporates Gibsonian affordances. Controllers under this research program use information perceived directly from the environment with little or no further processing, and implicitly respect the indivisibility of the agentenvironment system. Research investigating the relationships between environmental and robot properties can be used to design reactive controllers that provably allow robots to take advantage of these affordances. We lay out key features of our empirical, generative Gibsonian approach and both show how it illuminates existing practice and suggest that it could be adopted to facilitate the systematic development of autonomous robots. We limit the scope of projects discussed here to legged robot systems but expect that applications can be found in other fields of robotics research.
This paper was presented at the 2nd International Workshop on Computational Models of Affordances at ICRA 2019.
For more information, see: Kod*lab
Task-Based Control and Design of a BLDC Actuator for Robotics
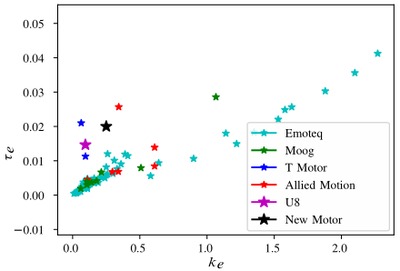

This paper proposes a new multi-input brushless DC motor current control policy aimed at robotics applications. The controller achieves empirical improvements in steady-state torque and power-production abilities relative to conventional controllers, while retaining similarly good torque-tracking and stability characteristics. Simulations show that non-conventional motor design optimizations whose feasibility is established by scaling model extrapolations from existing motor catalogues can vastly amplify the effectiveness of this new control-strategy.
Iterated Belief Revision Under Resource Constraints: Logic as Geometry
We propose a variant of iterated belief revision designed for settings with limited computational resources, such as mobile autonomous robots.
The proposed memory architecture—called the universal memory architecture (UMA)—maintains an epistemic state in the form of a system of default rules similar to those studied by Pearl and by Goldszmidt and Pearl (systems Z and Z+). A duality between the category of UMA representations and the category of the corresponding model spaces, extending the Sageev-Roller duality between discrete poc sets and discrete median algebras provides a two-way dictionary from inference to geometry, leading to immense savings in computation, at a cost in the quality of representation that can be quantified in terms of topological invariants. Moreover, the same framework naturally enables comparisons between different model spaces, making it possible to analyze the deficiencies of one model space in comparison to others.
This paper develops the formalism underlying UMA, analyzes the complexity of maintenance and inference operations in UMA, and presents some learning guarantees for different UMA-based learners. Finally, we present simulation results to illustrate the viability of the approach, and close with a discussion of the strengths, weaknesses, and potential development of UMA-based learners.
Reactive Navigation in Partially Known Non-Convex Environments
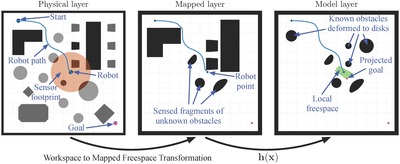

This paper presents a provably correct method for robot navigation in 2D environments cluttered with familiar but unexpected non-convex, star-shaped obstacles as well as completely unknown, convex obstacles. We presuppose a limited range onboard sensor, capable of recognizing, localizing and (leveraging ideas from constructive solid geometry) generating online from its catalogue of the familiar, non-convex shapes an implicit representation of each one. These representations underlie an online change of coordinates to a completely convex model planning space wherein a previously developed online construction yields a provably correct reactive controller that is pulled back to the physically sensed representation to generate the actual robot commands. We extend the construction to differential drive robots, and suggest the empirical utility of the proposed control architecture using both formal proofs and numerical simulations.
For more information: Kod*lab