
This technical report is a companion document to the CLAWAR 2012 paper of the same name, for which we explicitly write out a full derivation of the kinematics and dynamics. Please refer to that document for motivation, experimentation, and discussion.
Tail Assisted Dynamic Self Righting
In this paper we explore the design space of tails intended for self-righting a robot’s body during free fall. Conservation of total angular momentum imposes a dimensionless index of rotational efficacy upon the robot’s kinematic and dynamical parameters whose selection insures that for a given tail rotation, the body rotation will be identical at any size scale. In contrast, the duration of such a body reorientation depends upon the acceleration of the tail relative to the body, and power density of the tail’s actuator must increase with size in order to achieve the same maneuver in the same relative time. Assuming a simple controller and power-limited actuator, we consider maneuverability constraints upon two different types of parameters — morphological and energetic — that can be used for design. We show how these constraints inform contrasting tail design on two robots separated by a four-fold length scale, the 177g Tailbot and the 8.1kg X-RHex Lite (XRL). We compare previously published empirical self-righting behavior of the Tailbot with new, tailed XRL experiments wherein we drop it nose first from a 2.7 body length height and also deliberately run it off an elevated cliff to land safely on its springy legs in both cases.
This was supported primarily by the ARL/GDRS RCTA and the NSF CiBER-IGERT under Award DGE-0903711.
For more information: Kod*Lab
Laboratory on Legs: An Architechture for Adjustable Morphology with Legged


For mobile robots, the essential units of actuation, computation, and sensing must be designed to fit within the body of the robot. Additional capabilities will largely depend upon a given activity, and should be easily reconfigurable to maximize the diversity of applications and experiments. To address this issue, we introduce a modular architecture originally developed and tested in the design and implementation of the X-RHex hexapod that allows the robot to operate as a mobile laboratory on legs. In the present paper we will introduce the specification, design and very earliest operational data of Canid, an actively driven compliant-spined quadruped whose completely different morphology and intended dynamical operating point are nevertheless built around exactly the same “Lab on Legs” actuation, computation, and sensing infrastructure. We will review as well, more briefly a second RHex variation, the XRL latform, built using the same components.
For more information: Kod*Lab
Dynamical Trajectory Replanning for Uncertain Environments
We propose a dynamical reference generator equipped with an augmented transient “replanning” subsystem that modulates a feedback controller’s efforts to force a mechanical plant to track the reference signal. The replanner alters the reference generator’s output in the face of unanticipated disturbances that drive up the tracking error. We demonstrate that the new reference generator cannot destabilize the tracker, that tracking errors converge in the absence of disturbance, and that the overall coupled reference-tracker system cannot be destabilized by disturbances of bounded energy. We report the results of simulation studies exploring the performance of this new design applied to a two dimensional point mass particle interacting with fixed but unknown terrain obstacles.
For more information: Kod*Lab
Towards a terramechanics for bio-in spired locomotion in granular environments
Granular media (GM) present locomotor challenges for terrestrial and extraterrestrial devices because they can flow and solidify in response to localized intrusion of wheels, limbs and bodies. While the development of airplanes and submarines is aided by understanding of hydrodynamics, fundamental theory does not yet exist to describe the complex interactions of locomotors with GM. In this paper, we use experimental, computational, and theoretical approaches to develop a terramechanics for bio-inspired locomotion in granular environments. We use a fluidized bed to prepare GM with a desired global packing fraction, and use empirical force measurements and the Discrete Element Method (DEM) to elucidate interaction mechanics during locomotion-relevant intrusions in GM such as vertical penetration and horizontal drag. We develop a resistive force theory (RFT) to account for more complex intrusions. We use these force models to understand the locomotor performance of two bio-inspired robots moving on and within GM.
The sponsor was DARPA/SPAWAR N66001–05-C-8025.
For further information, visit Kod*lab.
A Bioinspired Dynamical Vertical Climbing Robot
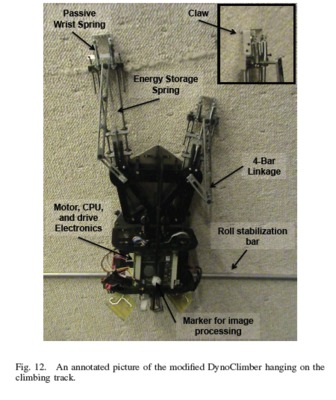

This paper describes the inspiration, design, analysis, implementation of and experimentation with the first dynamical vertical climbing robot. Biologists have proposed a pendulous climbing model that abstracts remarkable similarities in dynamic wall scaling behavior exhibited by radically different animal species. We study numerically a version of that pendulous climbing template dynamically re-scaled for applicability to utilitarian payloads with conventional electronics and actuation. This simulation study reveals that the incorporation of passive compliance can compensate for an artifact’s poorer power density and scale disadvantages relative to biology. However the introduction of additional dynamical elements raises new concerns about stability regarding both the power stroke and limb coordination that we allay via mathematical analysis of further simplified models. Combining these numerical and analytical insights into a series of design prototypes, we document the correspondence of the various models to the variously scaled platforms and report that our approximately two kilogram platform climbs dynamically at vertical speeds up to 1.5 bodylengths per second. In particular, the final 2.6 kg final prototype climbs at an average steady state speed of 0.66 m/s against gravity on a carpeted vertical wall, in rough agreement with our various models’ predictions.
Parametric Jumping Dataset on the RHex Robot
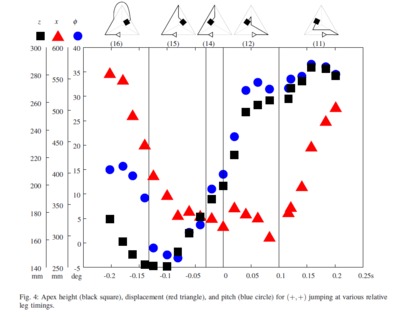

This report presents the apex state achieved after performing a variety of jumps with the XRL robot. A full account of the behaviors and the theoretical basis is given in another paper, this document is intended to simply provide higher resolution copies of those figures, and present the results in numerical form.
Autonomous Legged Hill and Stairwell Ascent


This paper documents near-autonomous negotiation of synthetic and natural climbing terrain by a rugged legged robot, achieved through sequential composition of appropriate perceptually triggered locomotion primitives. The first, simple composition achieves autonomous uphill climbs in unstructured outdoor terrain while avoiding surrounding obstacles such as trees and bushes. The second, slightly more complex composition achieves autonomous stairwell climbing in a variety of different buildings. In both cases, the intrinsic motor competence of the legged platform requires only small amounts of sensory information to yield near-complete autonomy. Both of these behaviors were developed using X-RHex, a new revision of RHex that is a laboratory on legs, allowing a style of rapid development of sensorimotor tasks with a convenience near to that of conducting experiments on a lab bench. Applications of this work include urban search and rescue as well as reconnaissance operations in which robust yet simple-to-implement autonomy allows a robot access to difficult environments with little burden to a human operator.
Multistable Phase Regulation for Robust Steady and Transitional Legged Gaits

We develop robust methods that allow specification, control, and transition of a multi-legged robot’s stepping pattern—its gait—during active locomotion over natural terrain. Resulting gaits emerge through the introduction of controllers that impose appropriately-placed repellors within the space of gaits, the torus of relative leg phases, thereby mitigating against dangerous patterns of leg timing. Moreover, these repellors are organized with respect to a natural cellular decomposition of gait space and result in limit cycles with associated basins that are well characterized by these cells, thus conferring a symbolic character upon the overall behavioral repertoire. These ideas are particularly applicable to four- and six-legged robots, for which a large variety of interesting and useful (and, in many cases, familiar) gaits exist, and whose tradeoffs between speed and reliability motivate the desire for transitioning between them during active locomotion. We provide an empirical instance of this gait regulation scheme by application to a climbing hexapod, whose “physical layer” sensor-feedback control requires adequate grasp of a climbing surface but whose closed loop control perturbs the robot from its desired gait. We document how the regulation scheme secures the desired gait and permits operator selection of different gaits as required during active climbing on challenging surfaces.
Experimental Investigations into the Role of Passive Variable Compliant Legs
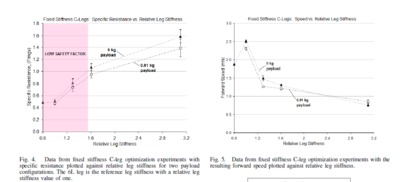

Biomechanical studies suggest that animals’ abilities to tune their effective leg compliance in response to changing terrain conditions plays an important role in their agile, robust locomotion. However, despite growing interest in leg compliance within the robotics literature, little experimental work has been reported on tunable passive leg compliance in running machines. In this paper we present an empirical study into the role of leg compliance using a composite tunable leg design implemented on our dynamic hexapod, EduBot, with gaits optimized for running speed using a range of leg stiffnesses, on two different surface stiffnesses, and with two different payload configurations (0 kg and 0.91 kg). We found that leg stiffness, surface compliance, and payload had a significant impact on the robot’s final optimized speed and efficiency. These results document the value and efficacy of what we believe is the first autonomous dynamic legged robot capable of runtime leg stiffness adjustment.
For more information: Kod*Lab