
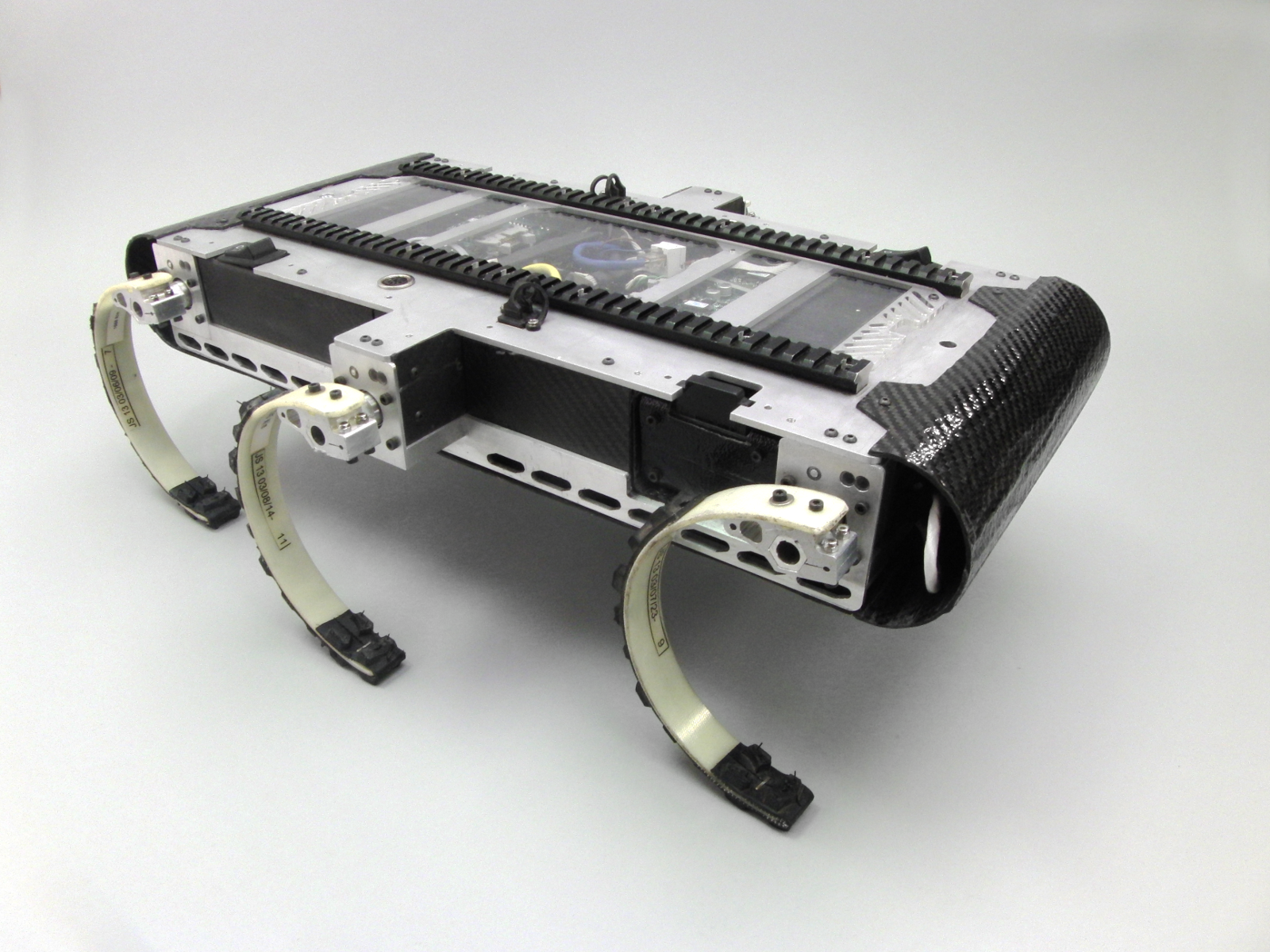
X-RHex is the latest version of the highly mobile RHex platform, designed with greater strength, longer runtime, and more mobility than previous versions, with a modular payload architecture to support a variety of research needs.

With new levels of mobility and durability, and the capability for rapid behavior development with a modular payload system, X-RHex is an effective research machine both in the laboratory and in outdoor field tests. Six powerful motors actuate compliant legs, allowing X-RHex to traverse a wide variety of terrains, including asphalt, grass, sand, mud, and rocks. By using a mil-spec rail mounted interface and standard electrical connections, X-RHex can support a wide variety of payloads, making it a mobile “laboratory on legs”. Now adding an extra sensor or testing a new behavioral algorithm is as easy as on a bench in the lab.
Key Features
X-RHex is designed to offer substantial improvements over its predecessors in terms of power, run-time, payload size, durability, and terrain negotiation, with a smaller volume and a comparable footprint and weight. Along with these advances, X-RHex incorporates a new modular payload interface and a redesigned electronics architecture. Read on …
Laboratory on Legs
Legged locomotion provides valuable challenges both in terms of the sensing and control required by a mobile robot. X-RHex, as part of a challenge to incorporate sensing onto highly dynamic and mobile legged robots, defines a payload interface to mount a variety of payloads and sensors. The payload system can even carry a second computer with a programmable GPU, making X-RHex the first robot of it’s size to have such a computational capability.Read on …
Sponsors
- NSF Legged Locomotion Desert Research
- NSF Frontiers in Integrative Biological Research (FIBR)
- IC Postdoctoral Fellowship
- ARL Robotics CTA
- DARPA Maximum Mobility and Manipulation (M3) – Behavior development and desert testing
- Maxon Motor USA – Educational discount for motors
- Advanced Motion Controls – Educational discount and support for motor controllers
- University of Pennsylvania
X-RHex Design Publications
Laboratory on Legs: An Architecture for Adjustable Morphology with Legged Robots
G. C. Haynes, Jason Pusey, Ryan Knopf, Aaron M. Johnson, and D. E. Koditschek
Proceedings of the SPIE Defense, Security, and Sensing Conference, Unmanned Systems Technology XIV (8387), April 2012. Full PDF
X-RHex: A Highly Mobile Hexapedal Robot for Sensorimotor Tasks
Kevin C. Galloway, G. C. Haynes, B. Deniz Ilhan, Aaron M. Johnson, Ryan Knopf, Goran Lynch, Benjamin Plotnick, Mackenzie White, D. E. Koditschek
University of Pennsylvania Technical Report, 2010. Full PDF
Other Publications Featuring X-RHex
Standing Self-Manipulation for a Legged Robot
Aaron M. Johnson, G. C. Haynes, and D. E. Koditschek
Proceedings of the 2012 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems, Full PDF
Autonomous Legged Hill and Stairwell Ascent
Aaron M. Johnson, Matthew T. Hale, G. C. Haynes, and D. E. Koditschek
IEEE International Symposium on Safety, Security, and Rescue Robotics, November 2011. Full PDF
On the Comparative Analysis of Locomotory Systems with Vertical Travel
G. C. Haynes and D. E. Koditschek
International Symposium on Experimental Robotics, December 2010. Full PDF