

PhD. Student
Email: jdup [at] seas.upenn.edu

Jeff is pursuing a PhD at the University of Pennsylvania in the field of robotic legged locomotion. He received Bachelor of Science in Engineering degrees in electrical engineering and computer science from the University of Michigan in 2011, during which he worked on automated collision avoidance of autonomous and semi-autonomous vehicles in traffic networks. Jeff’s current research interests are in the control of robotic legged locomotion, specifically investigating the utility of core actuation/compliance for quadrupedal platforms as well as developing formalisms for the description and control of steady and non-steady-state agile behaviors.
Current Projects
Dynamic bounding and leaping utilizing an actuated compliant spine with Inu robot.

Past Projects
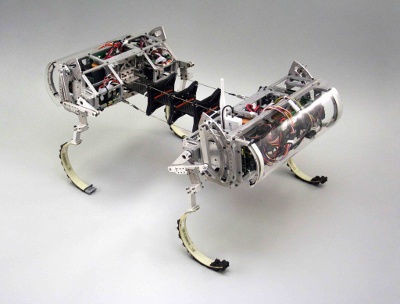
- Canid robot
The Canid robotic platform was Inu’s predecessor and was used to test various hypotheses regarding the presence of a spine morphology for robotic quadrupedal locomotion.
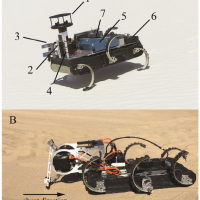
- Development of an aeolian sensor suite for scientific desertification monitoring using the RHex robot



- (at the University of Michigan) Automatic vehicle collision avoidance system
Teaching
- Coursera MOOC in robotics mobility – designed and presented ~25% of course
- teaching assistant for 2 semesters of ESE 210 (dynamical systems)
Publications
Conference Papers
J. M. Duperret and D. E. Koditschek, “Towards Reactive Control of Transitional Legged Robot Maneuvers” in International Symposium on Robotics Research, June 2017.
J. M. Duperret and D. E. Koditschek, “Empirical validation of a spined sagittal-plane quadrupedal model” in IEEE International Conference on Robotics and Automation, June 2017.
J. M. Duperret, B. Kramer, and D. E. Koditschek. “Core Actuation Promotes Self-manipulability on a Direct-Drive Quadrupedal Robot,” in International Symposium on Experimental Robotics, Tokyo, Japan, October 2016.
J. M. Duperret and D. E. Koditschek, “An empirical investigation of legged transitional maneuvers leveraging raiberts scissor algorithm,” in IEEE International Conference on Robotics and Biomimetics, December 2015.
J. M. Duperret, G. D. Kenneally, J. L. Pusey, and D. E. Koditschek, “Towards a comparative measure of legged agility,” in International Symposium on Experimental Robotics, Marrakech/Essaouira, Morocco, June 2014.
J. L. Pusey, J. M. Duperret, G. C. Haynes, R. Knopf, and D. E. Koditschek, “Free-standing leaping experiments with a power-autonomous elastic-spined quadruped,” in SPIE Defense, Security, and Sensing, vol. 8741. International Society for Optics and Photonics, 2013, pp. 87 410W–87 410W.
J. M. Duperret, M. R. Hafner and D. Del Vecchio, “Formal Design of a Provably Safe Robotic Roundabout System” in IEEE/RSJ International Conference on Intelligent Robots and Systems, October 2010.
Abstracts
J. M. Duperret and D. E. Koditschek, “A spine morphology for legged robots: Lessons learned and future directions,” Dynamic Walking 2018.
Technical Reports
J. M. Duperret and D. E. Koditschek, “Technical Report on: Towards Reactive Control of Simplified Legged Robotics Maneuvers,” Technical report, 2017.
S. Roberts and J. M. Duperret et al, “Desert RHex Technical Report: Tengger Desert Trip,” Technical report, 2014.
S. Roberts and J. M. Duperret et al, “Desert RHex Technical Report: Jornada and White Sands Trip,” Technical report, 2014.
J. M. Duperret, J. L. Pusey, G. C. Haynes, and D. E. Koditschek, “Canid, Pronking XRL Preliminary Comparison Dataset,” Technical Report, 2013.