

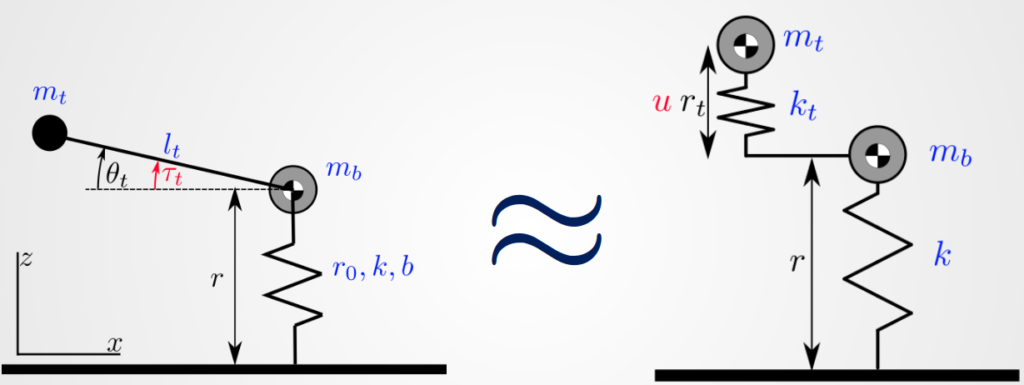
This work is focused on creating reusable controllers (templates) to enable more intelligent usage of internal degrees of freedom such as spines and tails. These templates include the classical spring loaded inverted pendulum and a double spring double mass model. Analysis of these models leverage hybrid averaging to yield analytical insight and stability guarantees. The hope is that by working with simple analytical tractable models, we will be able to learn when and how an internal degree of freedom is useful for agile behaviors. The main experimental platform is the Penn Jerboa. A tailed biped whose unique actuator distributions asks questions about when and how a high power tail is useful for agile locomotion.
People
Shane Rozen-Levy, Griffon McMahon, Declan Cambey, Dan Koditschek
Publications
Rozen-Levy, S., Koditschek, D. E. “Technical Report: A New Hopping Controller for Highly Dynamical Bipeds .” 2020.

Sponsors
- ONR grant # N00014-16-1-2817, a Vannevar Bush Fellowship held by Dan Koditschek
- Army Research Office under the SLICE Multidisciplinary University Research Initiatives Program award under Grant #W911NF1810327