
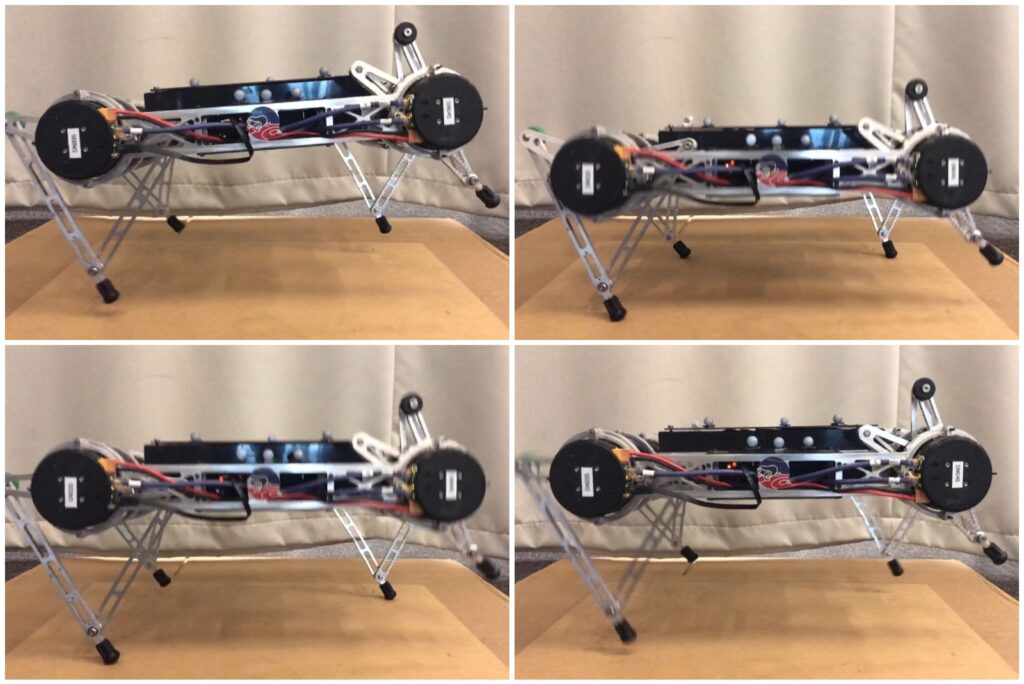
A vast number of applications for legged robots involve the performance of tasks in complex, dynamic environments. One consequence of this expectation is that these environments put legged robots at high risk for incurring limb damage. The ideal response to limb damage is for the robot to have the ability to adapt its locomotion such that it does not further damage itself and can move itself to a secure area for retrieval. There has been research in the past that has explored the capability of robots adapting to limb damage. However, the majority of fault tolerant strategies focus on simulated robots with locked joint failures performing quasi-static behaviors. Agile locomotion is often necessary for legged robots to traverse challenging terrains. The short supply of physical implementation as well as the small number of approaches that tackle the adapting to amputated limbs, indicates a gap in the literature. This research highlights the development of tripedal dynamic gaits for quadruped robots with a defective limb and a machine learning approach for identifying limb faults.
Contributors
Abriana Stewart-Height, Daniel E. Koditschek, Ph.D.
Publications
- Abriana Stewart-Height and Daniel E. Koditschek. “Technical Report on: Tripedal Dynamic Gaits for a Quadruped Robot”. In: arXiv preprint arXiv:2303.02280 (2023).
Sponsor
- ONR N00014-16-1-2817 Vannevar Bush Faculty Fellowship held by Koditschek
- NSF Graduate Research Fellowship Program