
Legged locomotion provides valuable challenges both in terms of the sensing and control required by a mobile robot. X-RHex, as part of a challenge to incorporate sensing onto highly dynamic and mobile legged robots, defines a payload interface to mount a variety of payloads and sensors. The payload system can even carry a second computer with a programmable GPU, making X-RHex the first robot of it’s size to have such a computational capability.
X-RHex has a modular payload system intended to facilitate the development of these sorts of advanced sensor-based behaviors on a portable, highly-dynamic legged robot. While essential sensors (motor encoders, electrical power measurements, and an IMU) are integrated within the body of the robot, additional sensors may be mounted using standardized electrical and mechanical interfaces to the top of the robot’s shell. A user can swap payloads on a lab bench or in the field within seconds. Payloads include traditional sensors, extra batteries, and even full additional payload computers, such as additional CPUs with programmable GPUs, making X-RHex the first legged robot of its size able to carry such computational power.
Payload Specification
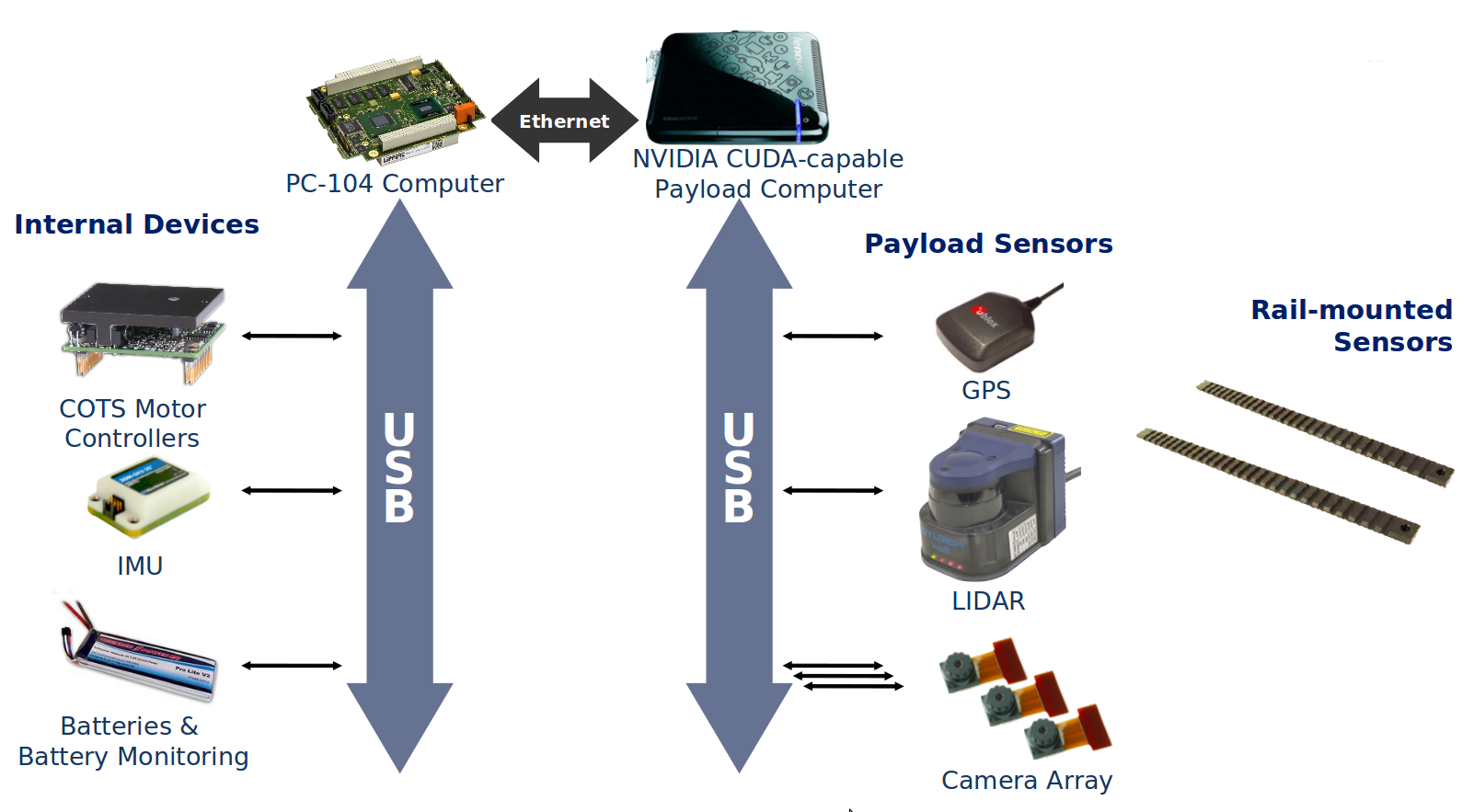
The payload interface delivers 5V, 12V, and battery voltage (37–42V) power, as well as USB and ethernet connectivity, to the payloads. All payloads are attached to the robot using the mil-spec Picatinny rail standard. Two rails, separated by 14 cm, allow the addition of an assortment of sensors and payloads. Full specs on the payload system will be available in an upcoming publication.
Tested Payloads
X-RHex is capable of carrying a wide variety of sensors and other payloads using the interface described. While most payloads of interest are generally smaller in mass compared to the robot, the machine has been successfully tested carrying up to 12 kg on its back (significantly greater than the overall weight of the robot itself). A summary of several of the payloads that have been tested with the X-RHex robot are:

- An Xbox Kinect to generate 3D point clouds for person following or other applications
- A variety of commercial webcams that can be used for teleoperation scenarios or image processing. See, for example, Microsoft Lifecam Cinema
- A set of three webcams that are used to create a panoramic teleoperation view.
- A GPS unit, including antenna, that provides position data to the robot in outdoor environments, the U-Blox EVK-5H
- An external IMU, the Microstrain 3DM-GX2, used in replacement or in addition to the internal IMU
- A LIDAR unit, the Hokuyo URG-04LX-F01, to get a line-scan point cloud of the space in front of the robot
- A secondary computer with onboard GPU for fast parallel processing of sensor data, along with a DC-DC converter to supply the 19V power required. Lenovo IdeaCentre Q110 Mini PC
- A wireless IEEE 802.11n access point for increased communication range over our traditional use of 802.11b/g wireless adapters
- A USB hub and USB flash storage devices
- A pair of COTS Picatinny handles, designed for use on weaponry, but easily used as carry handles for the robot, for instance, the Tippmann M16 Carry Handle – X7