this is what a copy and paste of pmwiki into word press looks like with links updated (in progress) for new word press site
The Penn Jerboa: A Platform for Exploring Parallel Composition of Templates
Technical Report to Accompany [1]
Avik De and D. E. Koditschek
Electrical and Systems Engineering, University of Pennsylvania
arXiv:1502.05347 | Penn ScholarlyCommons | Full PDF
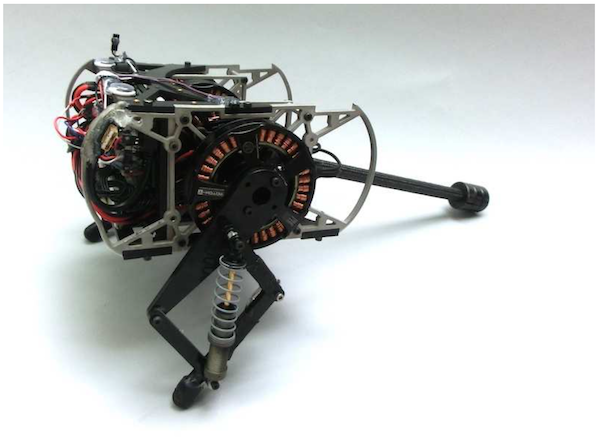 |
| Fig. 1. The Jerboa is a 2 Kg robot with hip-actuated legs and a 2DOF tail, pictured on the left as it appeared in the experiments in this paper. |
| Abstract |
| We have built a 12DOF, passive-compliant legged, tailed biped actuated by four brushless DC motors. We anticipate that this machine will achieve varied modes of quasistatic and dynamic balance, enabling a broad range of locomotion tasks including sitting, standing, walking, hopping, running, turning, leaping, and more. Achieving this diversity of behavior with a single under-actuated body, requires a correspondingly diverse array of controllers, motivating our interest in compositional techniques that promote mixing and reuse of a relatively few base constituents to achieve a combinatorially growing array of available choices. Here we report on the development of one important example of such a behavioral programming method, the construction of a novel monopedal sagittal plane hopping gait through parallel composition of four decoupled 1DOF base controllers. |
| For this example behavior, the legs are locked in phase and the body is fastened to a boom to restrict motion to the sagittal plane. The platform’s locomotion is powered by the hip motor that adjusts leg touchdown angle in flight and balance in stance, along with a tail motor that adjusts body shape in flight and drives energy into the passive leg shank spring during stance. The motor control signals arise from the application in parallel of four simple, completely decoupled 1DOF feedback laws that provably stabilize in isolation four corresponding 1DOF abstract reference plants. Each of these abstract 1DOF closed loop dynamics represents some simple but crucial specific component of the locomotion task at hand. We present a partial proof of correctness for this parallel composition of “template” reference systems along with data from the physical platform suggesting these templates are “anchored” as evidenced by the correspondence of their characteristic motions with a suitably transformed image of traces from the physical platform. |
| Acknowledgements: This work was supported in part by the ARL/GDRS RCTA project, Coop. Agreement #W911NF-1020016 and in part by NSF grant #1028237. |
| BibTeX entry |
@techreport{de_penn_2015,
author = {De, A. and Koditschek, D. E.},
title = {The {P}enn {J}erboa: A Platform for Exploring Parallel Composition of Templates},
note={arXiv:1502.05347},
year={2015},
month={Feb},
howpublished = "Online: \url{http://arxiv.org/abs/1502.05347}, \url{http://repository.upenn.edu/ese_reports/16}"
}
|
